Autoguiding (Automatische, kontrollierte Nachführung)
Wenn man die Montierung auf einen Stern ausrichtet und die
motorische Nachführung ohne weitere Kontrolle laufen
läßt, dann fällt nach kurzer Zeit einer der
Nachführfehler sofort auf. Der Stern wandert im Okular langsam in
eine Richtung davon, bleibt stehen, um dann wieder zum Ausgangspunkt
zurückzuwandern. Was man beobachtet ist der sog. "Periodischer
Schneckenfehler". Es handelt sich dabei um sehr kleine Abweichungen ,
die visuell kaum stören, aber die Aufnahmequalität eines Astrofotos sehr negativ beeinflussen.
1. Periodischer Fehler (PE - Periodical Error), Pendelfehler oder Schneckenfehler:

Die Achsen der parallaktische Montierung GP-DX werden über Schneckengetriebe bewegt, bestehend aus je einer Schnecke und je einem
Schneckenrad. Bei einer Umdrehung der Schnecke dreht sich das
Schneckenrad um einen Zahn weiter. Jedes Schneckengetriebe hat fertigungsbedingt einen
periodischen Fehler, so daß die Montierung sich
nicht gleichmäßig mit den Sternen mitbewegt. Die Montierung
läuft mal schneller und mal langsamer d.h. das Himmelsobjekt
pendelt um die Sollposition. Der PE beruht auf der Zahngeometrie (Evolventenverzahnung), auf ungenau gefertigten Zahnflanken der
Schnecke, des Schneckenrades sowie auf Ungenauigkeiten im Rundlauf der
Schnecke. Diese Fehler wiederholen sich periodisch bei jeder
Schnecken-Umdrehung, bei der Montierung GP-DX alle 10 Minuten.
Die Periode eine Schneckendrehung ergibt sich aus:
Ein Sterntag mit 86164sec : Zähnezahl des Schneckenrades mit 144 ergibt eine Periode von 598,36 sec (ca 10min.)
2. Grafische Darstellung des Schneckenfehlers PE:
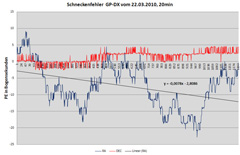
Die Grafik zeigt den Schneckenfehler in der Stundenachse meiner GP-DX Montierung
(RA-Achse blau).
Wie erhält man eine solche
Grafik? Dazu wird eine Videokamera, z.B. eine Webcam, statt eines Okulars verwendet. Die
Webcam wird über ein USB-Kabel an einen Computer angeschlossen.
Bei laufender Nachführung wird mit einer Aufnahme-Software fortlaufend jede
Sekunde ein Bild des eingestellten Sternes aufgenommen. Die Positionen
des
Sternes auf dem CCD-Chip werden ausgelesen und als x- und y-Koordinaten
abgespeichert. Diese Meßdaten werden mit dem Programm MS-Excel
ausgewertet und in einer Grafik ausgedruckt. Der Verlauf der blauen
RA-Kurve zeigt hier tendenziell nach unten und enthält eine linearen
Trendlinie (y
= - 0,0078x - 2,8086), die mit dem Programm MS-Excel generiert wurde.
In einem nächsten Schritt wird die blaue RA-Kurve entsprechend der
Trendlinie "begradigt" .
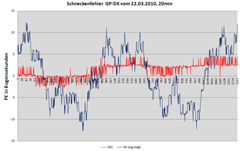
Die korrigierten RA-Meßdaten führen zu einer "begradigten"
blauen RA-Kurve. Der absolute Wert des Schneckenfehlers in RA-Richtung beträgt nun ca. +/- 12 Bogensekunden. Gemessen wurde über einen Zeitraum von 1200
sec (= 2x10 min) entspr. 2 Schnecken-Umdrehungen. In der roten DE-Kurve erkennt man eine leichte Drift, die auf eine ungenaue
Polausrichtung der RA-Achse hinweist. Die rote DE-Kurve läßt auch das
herrschende Seeing von ca 2 Bogensekunden erkennen. Die blaue RA-Kurve zeigt in der Grundschwingung einen sinusförmigen
Verlauf und ist
ebenfalls vom Seeing überlagert. Seeing-Probleme, also die Luftunruhe,
lassen die Kurven immer sehr zackenreich aussehen. Diese Ausreißer sind
nicht der Montierung anzulasten.
3. Autoguiding
Ein Autoguider in Form einer kleinen CCD-Kamera, z.B. Lodestar von StarlightXPress, analysiert ca. 1-mal pro Sekunde ein Bild des Guiderchips. Dabei erfaßt
sie die Position des Leitsterns auf dem Chip, kontolliert dessen Positionen und bei
Abweichungen schickt sie die passenden Korrektur-Impulse an beide Motore
der Montierung. Dieses Regelsystem arbeitet mit hoher Präzession,
so daß die Montierung mit
entsprechenden Steuerbefehlen gegensteuern kann. So werden die
Abweichungen im späteren Bild der Hauptkamera nicht sichtbar. Auch
eine kleine Drift in der Deklination, durch eine ungenaue Einnordung
der Montierung, wird der Autoguider ausgleichen können. Die
Korrektur-Geschwindigkeit der Montierung liegt bei etwa 0,5 facher
Nachführgeschwindigkeit. Damit das Regelsystem nicht überreagiert,
werden nur sehr kleine Korrekturen, allerdings in kurzen
Zeitabständen durchgeführt. In der Software MaxImDL ist im
Autoguidingteil ein automatischer Kalibrierungslauf vorgesehen. Die Software bewegt hierbei die
Montierung automatisch in alle 4 Richtungen. Bei diesem
Vorgang wird die Drift des Leitsternes bewertet und die Geschwindigkeit
des Leitsternes auf dem Guiderchip gemessen. Diese Kalibrierung muß
aktualisiert werden, wenn die Einbauposition der Guidingkamera
verändert wurde.
Zwei Möglichkeiten für das Autoguiding:
Leitrohr
Off-Axis-Guider
Wird fortgesetzt:


